






KAIST(총장 신성철)가 대형 구조물의 3차원 모델링 정보를 신속하게 수집·구축하는 드론 경로생성 기술을 개발했다.
KAIST는 조성호 전산학부 교수팀이 사전 정보 없이 각종 구조물의 정보를 수집해 재빠르게 3차원 모델링하는 드론 시스템을 개발했다고 14일 밝혔다.
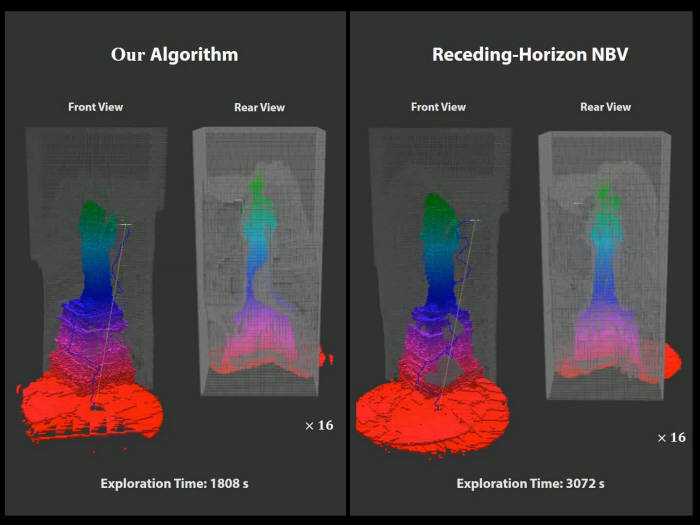
기존 자율주행 드론을 활용한 대형 구조물을 3D 스캐닝하는 기술은 구조물 전반을 탐지한 뒤 정보 수집이 부족한 부분에 추가 작업을 하는 형태라 경로 중복이 많이 발생했다.
연구팀은 알고리즘의 작업 우선순위를 조정해 드론 이동의 중복을 최소화 했다. 최대한 드론과 가까운 곳에서 세밀 스캐닝을 거친 후 다음 위치로 이동하게 했다. 스캐닝 도중 발생하는 탐지 공백을 없애, 이후의 경로 중복을 방지할 수 있다.
연구팀은 최적의 탐지 위치를 파악해 내는 '넥스트 베스트 뷰' 기술도 함께 적용했다. 현재 드론의 위치, 구조물의 탐지 대상 정보를 종합 연산해 가장 효율적인 스캐닝 위치를 가려내는 방식이다.
이들 기술을 적용하면 기존의 자율주행 드론보다 구조물 스캐닝 시간을 40% 가량 줄일 수 있다. 미국 '자유의 여신상'을 대상으로 한 시뮬레이션 실험에서 연구팀이 개발한 기술을 활용하니 1808초 만에 구조물 모델링 작업을 마쳤다. 기존 기술로는 3072초 걸리는 작업이었다.
연구팀은 앞으로도 드론을 이용한 다양한 3차원 모델링 기술을 연구한다. 수집 정보를 바로 시각화 할 수 있는 기술도 연구한다.
조성호 교수는 “어느 곳이든 자유롭게 이동하는 드론을 보다 효율적으로 이용해 각종 건물과 구조물 정보를 전산화하는 기술을 개발했다”면서 “건설 및 안전 분야, 각종 콘텐츠활용 분야에 이용돼 정보 구축의 시간과 비용을 줄일 수 있다”고 말했다.
대전=김영준기자 kyj85@etnews.com

