






각기 다른 물건이 쌓여 있거나 뒤섞인 상황에서도 원하는 물체를 집어내는 인공지능(AI) 기반의 '빈피킹(bin-picking)' 기술이 개발됐다. 빈피킹은 로봇이 상자나 선반에서 물체를 집고 꺼내는 기술이다. 미래 제조, 물류혁명을 이끌 핵심으로 주목 받고 있다.
전자부품연구원(KETI)은 전세웅 연구팀이 AI 기반 빈피킹 기술을 개발했다고 18일 밝혔다. 이 기술은 크기와 모양이 다른 물체가 혼재된 환경에서 원하는 물체를 자동으로 골라낼 수 있다.

기존에는 작업대상 물체 관련 정보를 사전에 등록하고, 물품을 정확한 위치에 정해진 자세로 놓아야 분류가 가능했다. 로봇을 일반 물류작업에 쓰기 어려웠던 이유다. 하지만 인공지능 기술의 발전으로 이젠 가능성이 열리고 있다.
KETI 빈피킹 기술의 핵심은 데이터 학습 '딥러닝'에 있다. 축적된 학습데이터를 통해 기계가 물체를 정확히 인지해 낼 뿐 아니라 유사한 형태의 다른 물체가 있어도 구분할 수 있다.
KETI는 데이터 축적을 위해 실제 동작을 통한 학습과 시뮬레이터 학습을 병행했다. 자동화된 실증데이터 수집시스템으로 대량의 실동작 학습데이터를 획득했다. 부족한 학습데이터는 시뮬레이터로 보완했다. 지난 1년간 하루 최대 3000번, 총 30만번 연습으로 실동작 데이터를 쌓았고 시뮬레이터를 통한 학습데이터는 270만개에 달한다.
실동작 학습은 로봇에 설치된 2D카메라와, 거리를 측정하는 3D카메라를 활용한 환경 인지에서부터 시작해 인식 네트워크 알고리즘으로 선반 또는 박스 등을 파악하고, 파지 대상 물체더미와 그 외의 물건들을 구분하는 순서로 진행됐다. 또 물체가 존재하나 파지가 곤란하다고 판단되면 가려진 물체를 치우거나 밀쳐보기도 하며, 대상물체가 보이지 않는 경우 뒤적이며 물체를 찾도록 했다. 시뮬레이터는 SW로 다양한 물체가 혼재하는 가상의 환경을 연출하고, 조명방향이나 세기, 카메라효과 등을 바꿔가며 데이터를 취득했다.
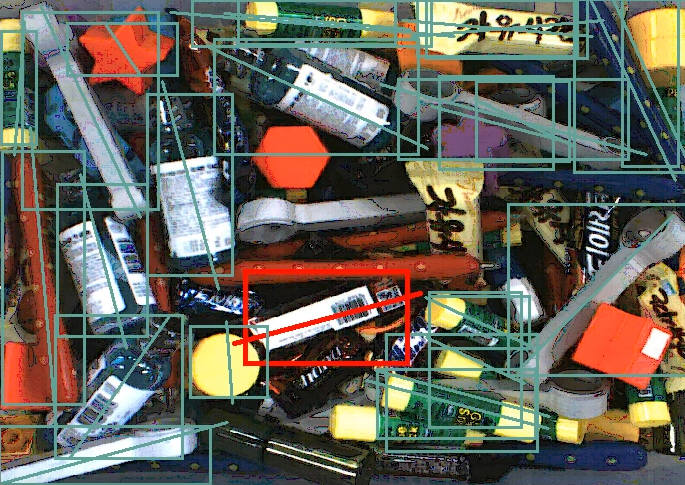
KETI는 이를 통해 인식률과 정확성을 끌어 올릴 수 있었다고 설명했다. 12종의 학습물체와 10종의 미학습 물체가 섞인 환경에서 인식률이 96.5%, 피킹 성공률이 82.6%를 기록했다고 밝혔다.
전세웅 KETI 지능로보틱스연구센터 책임연구원은 “물건들이 혼재된 상황에서 80%가 넘는 피킹 성공률은 물체가 정리, 정돈된 비혼재 상황에서의 해외 피킹 성공률과 유사한 수준”이라고 말했다. 그러면서 “향후 로봇팔 가격하락에 따른 대중화로 제조, 물류분야를 넘어 가사지원 서비스 로봇 등에 기술이 활용될 수 있을 것”이라고 강조했다.
KETI 빈피킹 기술은 산업통상자원부와 한국산업기술평가관리원의 산업현장핵심기술수시개발사업으로 지원된 '다량의 대상물에 대한 로봇용 조작 학습기술 개발' 과제로 진행됐다.
윤건일 전자/부품 전문기자 benyun@etnews.com

