






KAIST가 개발한 '이동로봇 자율주행 위치인식과 맵 작성기술'은 적은 비용으로 자율주행 정확도를 높이고 삼차원 위치인식까지 가능하게 하는 기술이다.
사용 센서는 지자기센서, 카메라, 2D 라이다(LiDAR)다. 라이다는 대상으로 쏜 펄스 레이저 신호와 반사 신호 간 지연시간 차이를 분석해 형상을 파악하는 센서다.
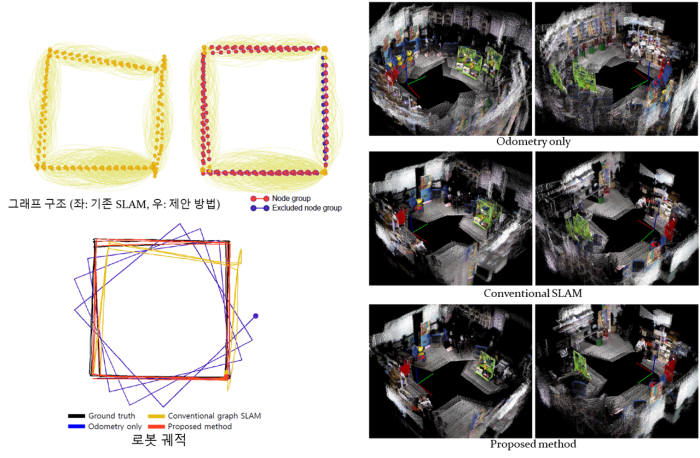
연구팀은 이들 센서를 융합해 '위치인식과 맵 작성기술(SLAM)'을 만들었다. 각 센서가 서로 단점을 보완하게 했고, 끊임없는 위치 관측으로 발생 오차를 보정했다. 또 여러 개 위치 후보군에서 가장 적절한 위치를 찾아내는 '몬테카를로 위치 인식 기술'도 담아 정확도를 극대화 했다.
이 결과로 관측 대상에 특징점이 적거나 움직이는 환경에서 위치 인식 오차가 커지는 문제를 해결했다. 크게는 미터 단위에 달하던 오차를 10㎝ 이내로 줄였다.
이 기술을 활용하면 이동로봇 자율주행 기능 구현에 필요한 갖가지 비용을 최소화할 수 있다. 추가 삼차원 맵 작성이나 정보 보정 비용을 절감할 수 있다. 억대에 달하는 3D 라이다 없이 삼차원 위치인식도 가능해진다. 이차원 정보를 계속 중첩해 삼차원 정보를 만드는 원리다. 기존에는 3D 라이다 없이 삼차원 위치인식이 불가능했다.
연구팀은 이미 국내 다섯 건, 해외 두 건 관련 특허를 확보했다.
명현 교수는 “값비싼 장치 없이 기존보다 높은 성능을 내는 것이 가장 큰 특징”이라며 “이동로봇 자율주행 보편화에 기여할 것”이라고 말했다.
대전=김영준기자 kyj85@etnews.com

