






국내 연구진이 용액 코팅 공정으로 압력·마찰을 구분하는 3차원 로봇피부를 손쉽게 구현하는 기술을 개발했다. 아무리 형태가 복잡한 로봇에도 낮은 비용으로 피부를 구현할 수 있어 휴머노이드·헬스케어 장치 기술 발달을 앞당길 전망이다.
한국연구재단(이사장 노정혜)은 스티브 박, 김정 KAIST 교수팀이 3차원 표면에 코팅이 가능한 로봇 피부 개발에 성공했다고 12일 밝혔다.

기존에는 미리 고체화 한 피부를 로봇에 부착하는 방식을 썼다. 한 번에 감쌀 수 있는 면적이 한정돼 있어 피부 구현 시간과 비용이 많이 들었다.
연구팀이 개발한 기술은 액체 용액을 활용한 것이 특징이다. 탄소나노튜브, 물, 탄성중합체를 혼합한 용액을 대상에 뿌려 굳히는 것만으로 로봇 피부를 만들 수 있다. 방법이 간편해 저비용·대량생산이 가능하고, 아무리 로봇 형태가 복잡해도 꼭 들어맞는 피부를 만들 수 있다.
연구팀은 이 피부에 사람에 가까운 촉각 기능도 부여했다. 기존 로봇 피부는 여러 방향의 자극에 동일하게 반응한다. 위에서 아래로 힘이 작용하는 '압력'과 수평·수직 방향으로 힘이 함께 작용하는 '마찰'을 구분할 수 없다.
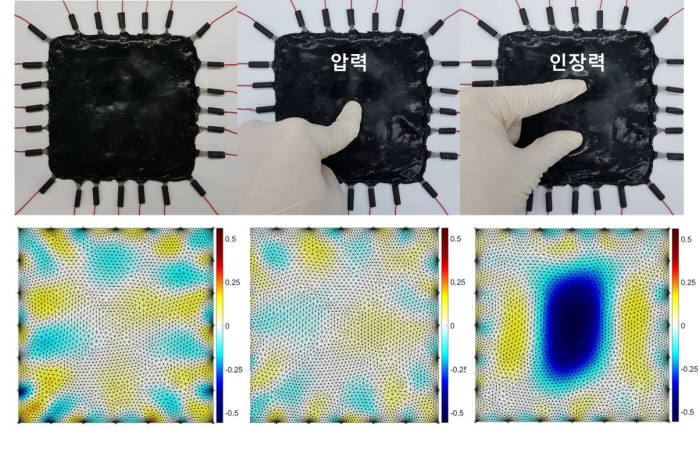
반면에 연구팀의 로봇 피부는 내부 기공의 형태변화와 전류를 활용해 힘이 가해지는 두 가지 형태를 구분한다. 마찰이 가해질 때 내부 기공에 미세 균열로 저항이 높아지고, 압력이 가해지면 기공이 닫히면서 저항이 적어지는 원리를 활용했다.
연구팀은 의료 영상 기법인 '전기임피던스영상법(EIT)'으로 로봇 피부에 가해지는 자극의 위치와 크기를 정확하게 측정하는 것에도 성공했다. EIT는 로봇 피부 모서리에만 전극이 필요해 전기배선도 최소화할 수 있다.
스티브 박 교수는 “이번에 개발한 로봇피부는 저비용으로 대량생산이 가능하고 복잡한 3차원 표면에도 손쉽게 코팅이 가능하다”며 “자극 감지에도 탁월해 로봇 피부 상용화에 한 걸음 더 가까워졌다”고 말했다.
대전=김영준기자 kyj85@etnews.com

