






코로나19 여파가 수그러들지 않는 가운데, 관련 검체를 비대면 방식으로 채취할 수 있게 하는 로봇 기술이 개발됐다.
한국기계연구원(원장 박상진)은 서준호 의료기계연구실 박사팀이 김남희 동국대 의대 교수팀과 함께 진료에 필요한 검사 대상물을 원격 채취할 수 있는 로봇 기술을 개발했다고 23일 밝혔다.
이 로봇 시스템은 의료진이 조작하는 마스터 장치, 환자와 접촉하는 슬레이브 로봇으로 이뤄진다. 병렬로봇 원격제어기술을 적용해 마스터 장치를 움직이면 슬레이브 로봇이 이를 따라 움직인다.
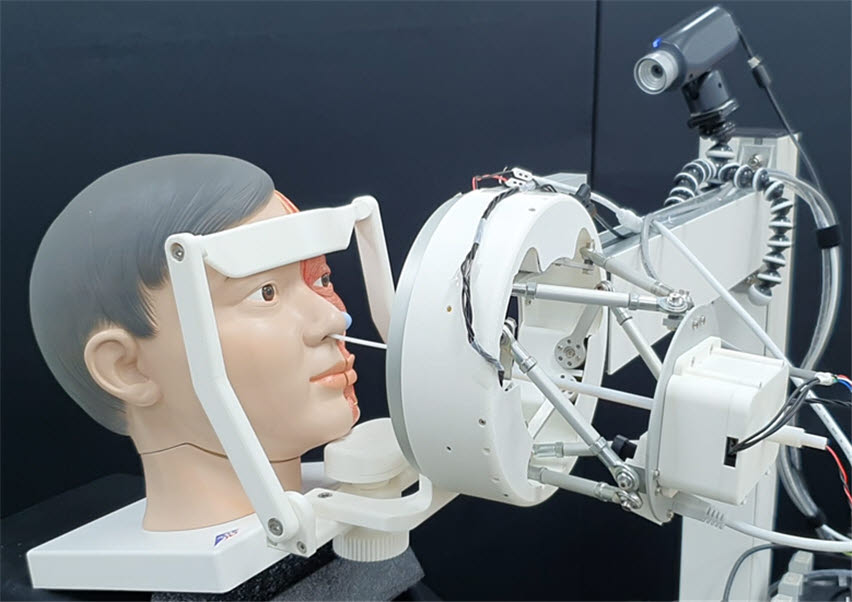
슬레이브 로봇에 장착된 검체 채취용 스왑은 마스터 장치 움직임대로 상하좌우로 이동하거나, 회전하며 원하는 부위에 삽입돼 검사 대상물을 채취할 수 있다. 의료진은 환자 콧구멍과 입, 스왑 위치를 영상으로 확인하면서 로봇을 직접 작동할 수 있다. 또 스왑을 삽입하는 힘을 검사자가 원격 모니터링 할 수 있어 정확도와 안전성을 높일 수 있다. 서로 떨어진 환자와 검사자가 음성·영상으로 통신할 수 있게 하는 기능도 더했다.
연구팀은 이 시스템을 이용해 고전염성 바이러스 위험 없이 얻을 수 있다고 설명했다. 환자 얼굴 크기 정도 소형, 저가의 로봇으로 만들 수 있어 다양한 의료현장에서 쉽게 활용할 수 있을 전망이다.

서준호 박사는 “이 기술을 이용하면 고위험 전염병 의심환자 검체를 환자와 직접 대면하지 않고 채취할 수 있다”며 “이번 코로나19 바이러스 확산과 같은 고위험 감염병의 비대면 검체 채취방법 중 하나로 활용돼 보다 안전한 의료 활동 속에 감염병 확산을 저지할 수 있도록 돕고 싶다”고 말했다.
김남희 교수는 “의료진 감염 위험을 최소화 할 수 있을 뿐 아니라 검체 채취 시 보호 장비 착용에 따른 의료진의 불편감도 최소화할 수 있을 것”이라며 “앞으로 감염병 진단에 임상적 활용도가 매우 클 것으로 예상 된다”고 말했다.
대전=김영준기자 kyj85@etnews.com

