






광주과학기술원(GIST·총장 임기철)은 김표진 기계로봇공학과 교수팀이 미국 항공우주국(NASA)과의 공동 연구를 통해 국제우주정거장(ISS)과 같은 복잡한 환경에서도 로봇이 방향을 잃지 않고 안정적으로 움직일 수 있도록 돕는 '디지털 트윈 기반 시각 나침반 기술'을 개발했다고 21일 밝혔다.
이번 연구는 김표진 교수팀이 NASA 연구팀과 함께 올해 3월 세계 최초로 구축·공개한 ISS 실내 자율 항법용 데이터세트 '애스트로비(Astrobeet)'를 활용한 후속 성과다. 연구팀은 해당 데이터세트를 기반으로 실제 우주 환경과 유사한 조건에서 실험을 진행해 기술의 정확성과 실효성을 입증했다.
ISS는 미세중력 환경으로 위아래 구분이 없어 로봇이 방향을 인식하고 길을 찾기 어렵다. 특히 무중력 상태에서 운용되는 애스트로비 로봇은 제자리에서 전후좌우로 자유롭게 회전하는 움직임이 빈번해 기존의 시각 기반 항법 기술로는 방향 인식에 실패하는 경우가 많았다.
이러한 문제를 보완하기 위해 최근에는 건물 구조가 수평·수직으로 정렬돼 있다는 가정에 기반한 '맨해튼 월드(Manhattan World)' 모델처럼 공간의 구조적 규칙성을 활용하는 방식이 사용되고 있다. 하지만 ISS 내부는 설비와 부유 물체가 복잡하게 얽혀 있어 선이나 벽과 같은 구조적 특징이 가려지거나 흐려지는 경우가 많아 정확한 인식이 어렵다.
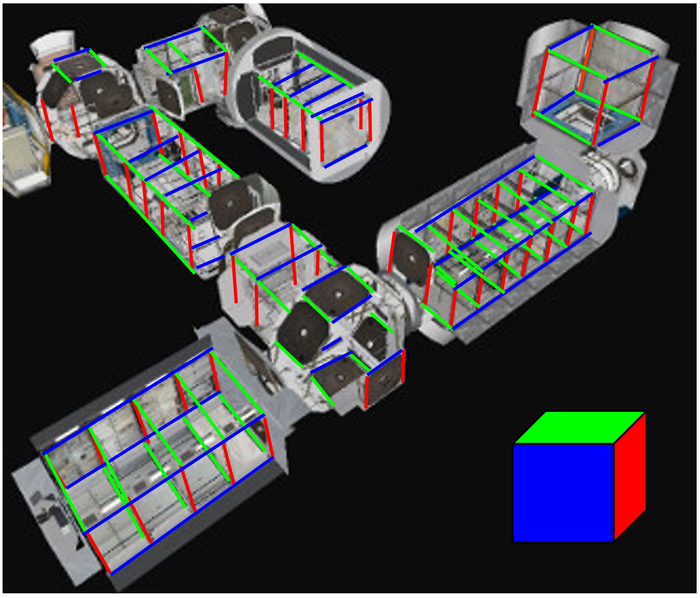
연구팀은 이러한 한계를 극복하기 위해 '디지털 트윈' 기술로 실내 3D 공간의 방향 지도를 구축하고 이를 활용해 우주 로봇이 누적 오차 없이 절대적인 자세를 정확히 측위할 수 있는 새로운 기법을 개발했다. 핵심 원리는 실제 촬영 영상에서 감지된 구조적 선을 디지털 트윈 모델과 비교·검증해 혼동되거나 불필요한 선을 제거하고, 신뢰할 수 있는 구조만을 선별하는 것이다.
연구팀은 GIST-NASA 공동연구로 세계 최초 구축해 공개한 ISS 자율비행 로봇용 데이터세트를 활용한 실험을 통해 이 기술의 우수성을 입증했다.
김표진 교수는 “이번 연구는 우주정거장과 같은 극한 환경에서도 로봇이 방향을 잃지 않고 스스로 움직일 수 있도록 만든 기술”이라며, “앞으로 이러한 디지털 트윈 기반 기술이 공항, 병원, 창고 등 복잡한 실내 공간에서도 자율 로봇의 정확한 길찾기를 가능하게 할 것으로 기대된다”고 말했다.

김영준 기자 kyj85@etnews.com

