






고급 자동차 위주로 긴급자동제동(AEB) 시스템 탑재가 일반화하면서 수년 내 기능 고급화·세분화가 요구된다. 내년 유럽을 시작으로 AEB 기능 평가가 교외(Inter-Urban), 도심(City), 보행자(Pedstrian) 환경으로 세분화되기 때문이다. 특히 보행자는 추돌 회피 대상 자체가 달라 AEB 개발의 새 화두로 떠오를 전망이다.
9일 자동차부품연구원과 업계에 따르면 유럽은 내년부터 신차안전도평가(유로 NCAP)에서 보행자 AEB 평가를 시작한다. 이를 위해 보행자 추돌 상황 특수성을 고려한 평가 방법도 새로 개발한다. 팔·다리가 움직이는 새 더미(차량 안전도 평가에 쓰이는 마네킹)를 마련하고 보행자 출현 상황을 세분화하는 것이 골자다.
AEB는 기본적으로 앞차와 추돌 상황을 가정한 지능형운전자보조시스템(ADAS)이다. 카메라를 중심으로 레이더, 라이다 등 복수 센서에서 취합한 데이터를 융합해 전방 장애물을 인식한다. 장애물을 발견하면 1차로 계기판에 경고를 띄우고, 운전자가 브레이크를 밟지 않으면 자동으로 긴급 제동을 실시한다.
도심 구간에서는 정지 상태 전방 차량을, 교외 구간에서는 주행 상태 전방 차량을 정확히 인식하는 것이 관건이다.
하지만 보행자의 경우 추돌 대상의 특성 자체가 달라진다. 자동차와 달리 팔·다리 등 신체 부위 움직임에 따라 속도가 분산된다. 또 자동차는 도로 안에서 추돌 상황이 발생하는 반면, 보행자는 도로 바깥에서 추돌 위험 구간으로 진입하는 특성도 있다. 추돌 상황을 예측하기가 훨씬 까다로워지는 셈이다.
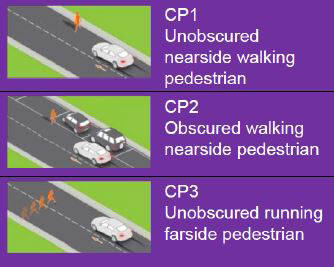
유로 NCAP위원회는 보행자 AEB 평가 환경을 △주행차로 바로 오른쪽에서 성인 보행자가 걸어 나오는 상황(CP1) △정지 차량 뒷편에서 어린이 보행자가 걸어 나오는 상황(CP2) △주행차로 건너편에서 성인 보행자가 뛰어오는 상황(CP3) 세 가지로 나눌 예정이다.
이 중 두 번째 상황은 당분간 만점을 받는 회사가 없을 정도로 기술 난이도가 높다. 사각지대에서 작은 보행자가 튀어나오는 만큼 인식에서 제동까지 허용되는 시간이 1초 미만이다. CP1은 보행자가 다가오다 멈추는 상황을 인식하는 기술, CP3는 넓은 화각으로 보행자를 미리 인식하는 기술이 핵심이다.
또 실제 사고 재현율을 높이기 위해 기존과 달리 다리가 움직이는 새 더미가 채택된다. 이에 따라 카메라에 보행자 움직임을 인식하는 알고리즘이 탑재되면 더 정확한 인식이 가능한 셈이다.
시차는 있지만 국내 상황도 비슷하다. 교통안전공단은 2017년부터 국내 신차안전도평가(K-NCAP)에서 교외, 도심, 보행자 상황으로 세분화된 AEB 평가를 실시한다. 상황 분류 체계가 유로 NCAP과 같아 유사한 평가 방식이 채택될 가능성이 높다.
자부연 관계자는 “보행자 AEB는 차량 AEB와 추돌 대상 자체가 달라 추가로 구현해야 할 기술이 많다”며 “개발 과정에서 실제 사고 상황을 가정한 설계가 요구된다”고 설명했다.
송준영기자 songjy@etnews.com