






포스텍(POSTECH)은 김기훈 기계공학과·융합대학원 교수, 박사과정 박재현 씨 연구팀이 산업현장의 작업자 안정과 효율 향상을 동시에 도울 수 있는 햅틱 장치를 개발했다고 16일 밝혔다. 이번 연구성과는 최근 로보틱스 분야 국제 학술지인 'IEEE Transactions on Industrial Informatics'에 게재됐다.
공장과 제철소처럼 고위험 산업현장에도 자동화 바람이 불고 있다. 하지만 로봇 기술이 발전해도 사람 손길이 꼭 필요한 작업은 여전히 존재한다. 문제는 로봇을 조작하는 일이 생각보다 까다롭고, 작은 실수가 사고로 이어질 수 있다는 점이다.
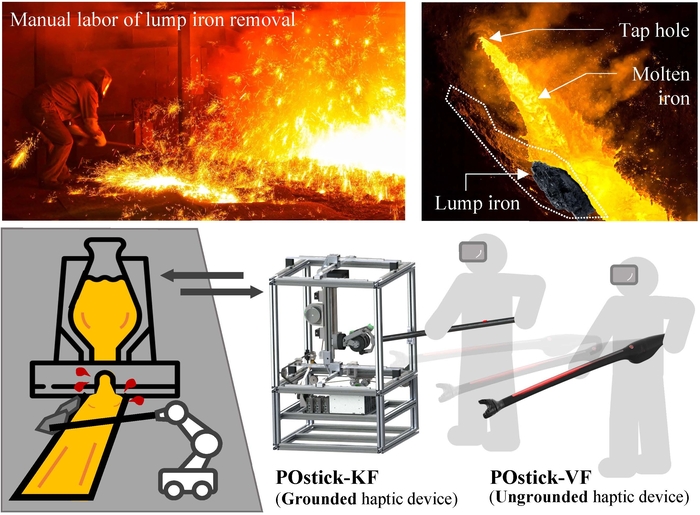
이를 해결하기 위해 연구팀은 사용자가 로봇을 조작할 때 손끝 감각을 그대로 느낄 수 있는 햅틱 장치를 두 가지 형태로 구현했다.
'POstick-KF(Kinesthetic Feedback)'는 로봇이 무언가를 밀거나 당길 때 느끼는 힘의 변화를 사용자에게 그대로 전달해, 섬세하고 정밀한 조작이 가능하다. 반면, 'POstick-VF(Visuo-tactile Feedback)'는 진동을 통한 촉각 피드백과 시각적인 피드백을 동시에 제공해 더 넓은 공간에서도 효율적으로 사용할 수 있다. 두 장치는 모두 실제 작업 도구 크기와 모양을 본떠 설계돼 초보자도 쉽게 적응할 수 있고, 현장 상황과 사용자 숙련도에 따라 선택적으로 활용할 수 있다.
시뮬레이션 실험에서도 이 장치들의 효과는 뚜렷하게 나타났다. 기존 햅틱 장치보다 목표 조작의 정확도가 높고, 장애물과의 충돌도 현저히 줄었다. 특히, POstick-VF는 사용 시간이 늘어날수록 사용자 숙련도가 눈에 띄게 향상되는 등 훈련 효과 측면에서도 우수한 성과를 보였다.
여기에 디지털 트윈(Digital Twin) 기술을 연동해 가상 공간에서 미리 실제 로봇 동작을 시뮬레이션할 수 있도록 했으며, 증강현실(AR) 기술까지 접목해 사용자의 몰입도와 집중도를 높인 점도 주목할 만하다.
김기훈 교수는 “사람의 손길이 필요한 작업을 로봇과 함께 더욱 안전하고 정밀하게 수행할 수 있도록 돕는 기술”이라며, “산업현장의 안전성을 강화하고 작업자의 부담을 줄이는 데 기여하기를 바란다”라는 말했다.
한편, 이 연구는 포스코홀딩스의 지원을 받아 수행됐다.
포항=정재훈 기자 jhoon@etnews.com

