







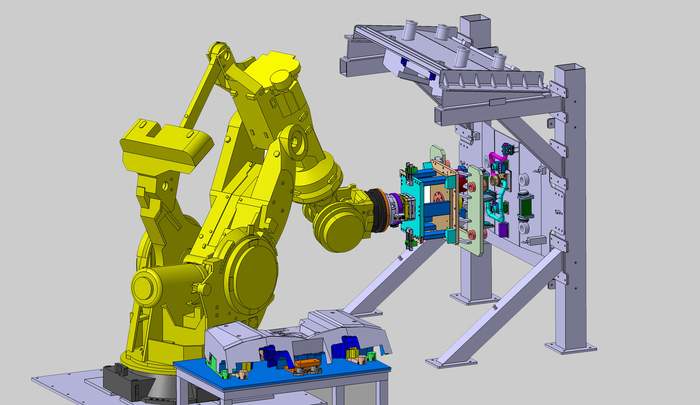
프랑스 남부 국제열핵융합실험로(ITER) 현장에는 '고질라(Godzilla)'라는 산업용 로봇이 설치돼 있어요.
높이 4미터, 팔 길이 5미터에 달하는 고질라는 전 세계에서 가장 강력한 산업용 로봇으로 불리며, 최대 2.3톤의 하중을 들어 올리고 이동할 수 있죠.
이 로봇은 단순히 무거운 물건을 들어 올리는 역할을 넘어, ITER 토카막(Tokamak) 내부 조립을 위한 첨단 도구와 기술을 시험·통합하는 플랫폼 역할을 해요.
고질라, 조립 준비의 핵심 장치
ITER의 플라즈마 챔버 내부에는 2만 개에 가까운 부품이 설치돼야 해요.
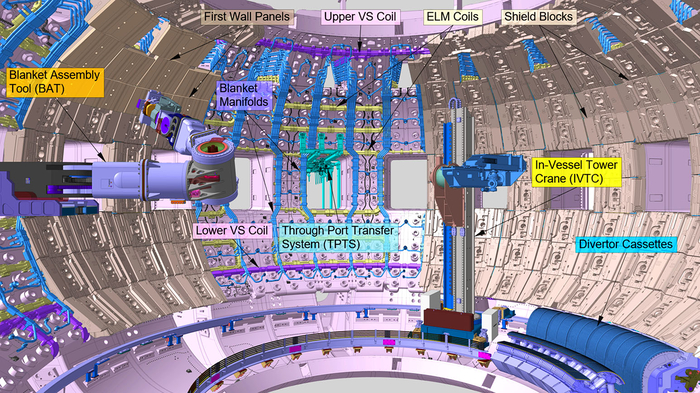
각 부품은 크기와 형태가 다양하고, 대부분 맞춤으로 제작하죠. 코일, 매니폴드, 블랭킷 모듈, 플라즈마를 직접 마주하는 퍼스트 월(first-wall) 패널 등 여러 개의 시스템 레이어가 겹겹이 쌓이는 구조여서, 설치 과정은 극도로 정밀하고 복잡해요.
고질라는 이러한 작업을 준비하는 핵심 장치예요. 실제 내부 조립을 담당할 로봇들이 사용할 도구(tool)와 기술을 시험하고 최적화하며, 다양한 장비를 안전하게 교체·운용할 수 있는 툴 체인저(tool changer) 시제품도 테스트해요. 이 과정을 통해 향후 진공용기 내부에서 조립 로봇들이 신속하고 정확하게 작업할 수 있는 기반이 마련돼요.
맞춤형 로봇과 감각 시스템
표준 산업용 로봇은 팔, 관절, 근육을 갖추고 있지만, 인간의 두 가지 필수 감각인 시각(vision)과 촉각(touch)은 결여돼 있어요.
반면 고질라를 포함한 ITER 조립 로봇은 일반 산업용 로봇과 다르게 설계돼요.
ITER에서 맞춤 제작되는 로봇은 유럽 연합 기관인 퓨전포에너지(Fusion for Energy)가 개발한 시각 시스템을 장착해 각 도구를 설치 목표에 정확히 맞추고, 힘·토크 센서를 이용해 부품에 가해지는 압력과 힘을 감지하며 제어할 수 있어요.
작업은 순차적이 아닌 병렬 방식인 롤링 웨이브(Rolling Waves) 전략으로 진행돼요. 한 팀이 특정 레이어의 부품을 설치하면, 다음 팀이 곧바로 이어서 다음 레이어를 설치하는 방식으로, 설치 시간과 공동 작업 리스크를 줄이는 것이 목표죠.
원격 운용·로봇 전문가 라파엘 헤리(Raphael Hery)에 따르면, 진공용기 내부처럼 제한적이고 조밀한 환경에서는 시각과 촉각이 필수적이며, 이를 통해 부품이나 주변 구조물을 손상시키지 않으면서 정밀하고 안전하게 조립할 수 있다고 해요.
고질라와 관련 장비
3월부터 고질라는 1:1 크기 모형과 인터페이스를 활용해 개발 중인 도구와 기술을 시험하게 돼요. 이를 기반으로 실제 로봇이 진공용기 내부 조립 작업을 수행할 때 원활하고 안전하게 운영될 수 있도록 준비하죠.
고질라 플랫폼에서 검증이 완료되면, 자체 개발 장비와 일본 전담 기관(Japanese Domestic Agency)에서 개발한 도구와 기술도 실제 조립 로봇에 통합돼요. ITER에서 운영될 로봇 시스템에는 인-베셀 타워 크레인(in-vessel tower crane)과 블랭킷 조립 운반기(blanket assembly transporter)가 포함돼요.
블랭킷 조립 운반기는 고질라의 세 배 크기인 36~39톤급 장치로, 현재 인도 라르센 앤 투브로(Larsen & Toubro Ltd)에서 제작 전 설계 단계에 있고, 인-베셀 타워 크레인은 기존 CNIM 제품을 현장에 맞게 최적화할 예정이에요. CNIM은 프랑스 산업 기술 기업이에요.
조립 전략과 운용 방식
롤링 웨이브 방식에서는 2대의 블랭킷 조립 운반기와 1대의 인-베셀 타워 크레인이 병렬로 운영되며, 맞춤형 이동식 작업 플랫폼에 탑재된 제로 그라비티 암(zero gravity arms)을 이용해 작업자가 직접 조립을 수행해요.
진공용기 내부 조립 준비는 프랑스의 ITER 토카막 조립 준비 건물에 국한되지 않아요. 인도, 일본, 기타 전담 기관에서도 진행되고 있고, 유럽은 인-베셀 디버터 원격 운용 시스템(in-vessel divertor remote handling system)을 조달하고 있죠.
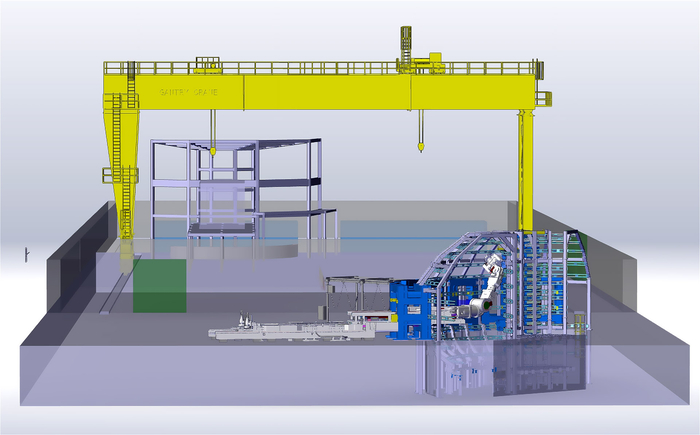
현장 시설과 연습 환경
현장에는 1:1 크기 강철 구조물 두 개가 설치돼 있는데, 각각 ITER 진공용기의 3분의 1에 해당해요. 작업자는 실제 조립 로봇을 사용해 조립 기술을 연습할 수 있어요.
기존 크라이오스타트(Cryostat) 작업장에는 인-베셀 타워 크레인이 설치될 구조물이 배치되며, 인접 건물에는 블랭킷 조립 운반기와 관련 장비를 위한 공간이 마련돼요. 향후 추가 작업을 대비해 다른 건물에도 여유 공간이 확보되죠.

고질라와 ITER 프로젝트의 미래
고질라는 ITER 핵융합 토카막 내부 조립을 위한 기술 개발과 최적화의 중심축 역할을 수행하며, 산업용 로봇을 넘어 프로젝트 전체 목표 달성을 뒷받침하고 있어요.
이 과정에서 ITER 프로젝트는 2036년까지 완전한 자기 에너지(full magnetic energy) 달성을 목표로 하고 있으며, 2039년에는 중수소-삼중수소(deuterium-tritium) 운용을 시작해 실용적 핵융합 에너지로 나아가는 중요한 발판을 마련할 계획이에요.
라파엘 헤리는 진공용기 내부 조립을 준비하기 위한 안정적 시스템을 개발하는 일이 매우 중요한 과제라고 설명했어요. 모든 준비가 완료되면 롤링 웨이브 작업은 거의 중단 없이 하루 24시간, 주 6일, 약 2년간 수행될 예정이라고 덧붙였답니다.
최성훈 기자 csh87@etnews.com