






광주과학기술원(GIST·총장 임기철)는 이규빈 AI융합학과 교수팀이 사람처럼 두 팔을 함께 움직여 균형을 잡고 물체를 안정적으로 집어 조작할 수 있는 'AI 양팔 로봇 파지(Grasp·집기) 기술'을 개발했다고 9일 밝혔다.
최근 물류·제조·의료 등 다양한 산업의 실제 환경에서 물리적으로 작업을 수행하는 피지컬 AI에 대한 수요가 증가하면서, 두 팔을 이용해 물체를 안정적으로 잡고 다루는 양팔 로봇이 주목받고 있다. 가구처럼 크거나 무거운 물체는 한 팔로는 다루기 어려워 두 팔이 협력해 안정적으로 파지하는 기술이 필수적이다.
하지만 양팔 파지는 팔의 위치·방향·힘을 모두 고려해야 해 경우의 수가 많고 두 팔이 서로 부딪히지 않으면서 물체에 가해지는 힘을 균형 있게 분산해야 하는 등 훨씬 복잡한 제어가 필요하다. 움직임이 충돌하거나 힘이 한쪽으로 치우치는 문제가 발생해 실제 환경에서 안정적인 양팔 협동 구현에 한계가 있었다.
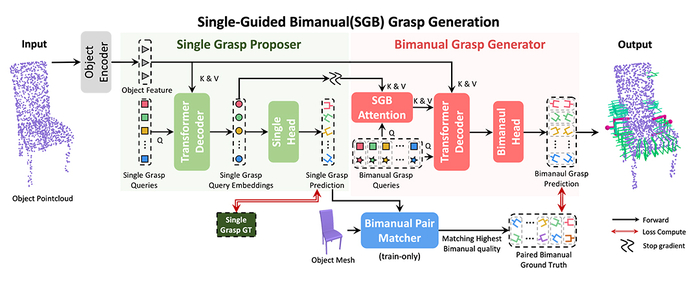
연구팀은 두 팔을 처음부터 하나의 시스템처럼 동시에 고려하는 AI 모델 '양팔 파지 로봇 시스템'을 개발했다. 입력부터 결과까지 하나의 과정으로 처리하는 엔드 투 엔드 방식으로 별도의 단계 나누기 없이 두 팔의 협동을 한 번에 학습한다.
이 시스템은 사람이 물건을 집는 과정을 닮은 세 단계로 작동한다. 먼저 카메라를 이용해 목표물을 수많은 점으로 이루어진 포인트 클라우드 형태로 인식하고, 이를 바탕으로 전체 형상과 표면 구조를 동시에 분석한다. 이는 사람이 물건을 집기 전 눈으로 어디를 잡을지 판단하는 과정과 유사하다.
다음으로 한쪽 팔 기준에서 안정적으로 잡을 수 있는 다양한 위치를 먼저 찾은 뒤 이를 길잡이로 삼아 두 팔이 함께 잡을 수 있는 조합을 효율적으로 만들어 내는데, 이 과정은 복잡한 경우의 수를 크게 줄여 빠른 계산을 가능하게 한다.
마지막으로 두 팔이 서로 간섭하지 않으면서도 물체에 가해지는 힘이 균형을 이루는 최적의 조합을 선택해, 가장 안정적인 파지 자세를 결정한다.
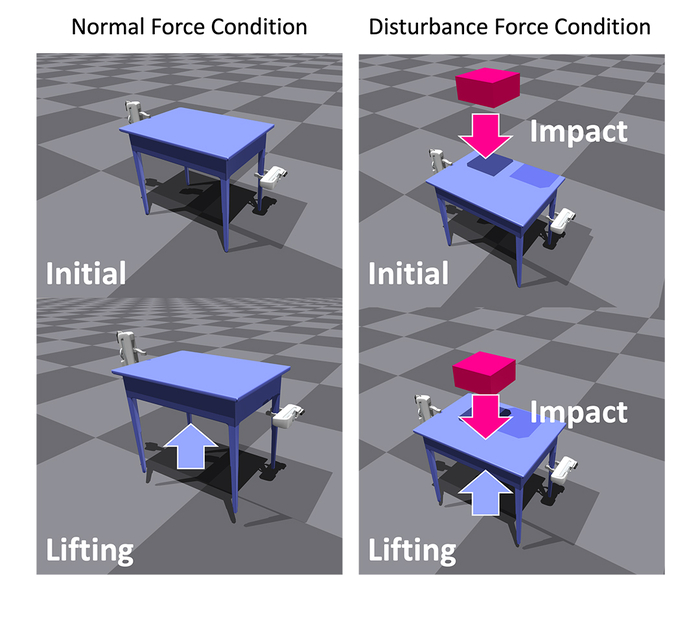
연구팀의 성능 검증 결과, 의자·선반·수납함 등 다양한 형태의 물체 100개를 활용한 가상 실험에서 89.67%의 파지 성공률을 기록해 기존 기술보다 약 18% 포인트(p) 향상된 성능을 보였다. 외부에서 충격을 가하는 조건에서도 기존 기술보다 약 23%p 향상된 59.72%의 성공률을 유지해 실제 환경에서도 안정적으로 작동할 수 있음을 확인했다.
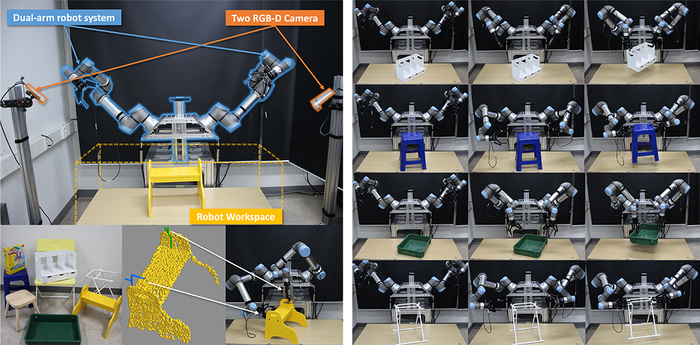
특히 가상 환경에서 학습한 AI 모델을 실제 로봇에 추가 학습 없이 적용했음에도 무거운 계단형 구조물부터 불규칙한 형태의 의자까지 실제 환경의 다양한 물체를 대상으로 평균 88% 이상의 파지 성공률을 달성해 현장 적용 가능성과 범용성, 안정성을 입증했다.
이규빈 교수는 “이번 연구는 로봇의 두 팔 협동을 하나의 통합된 방식으로 학습시켜 별도의 추가 학습 없이도 가상 환경에서 실제 로봇으로 바로 적용할 수 있음을 입증한 최초의 통합형 양팔 파지 시스템”이라고 말했다.
이어 “향후 대형 가구 운반, 물류 창고 자동화, 제조 현장의 중량물 조립 등 기존의 단일 팔 로봇으로는 한계가 있었던 다양한 분야에서 양팔 로봇의 실용화를 한 단계 앞당길 수 있을 것으로 기대한다”고 덧붙였다.
광주=김한식 기자 hskim@etnews.com

