







원전 사고 현장 등 사람이 접근하기 어려운 재난 현장에 투입할 원격 조종 로봇이 개발됐다. 아직은 프로토타입 단계지만 조만간 재난안전산업 활성화에 크게 기여할 것으로 기대된다.
배준범 울산과학기술원(UNIST) 기계 및 원자력공학부 교수는 16일 킨텍스에서 개막된 `제2회 대한민국 안전산업 박람회`에 원격 조종 재난 현장 대응로봇(이하 재난대응로봇)을 공개했다.
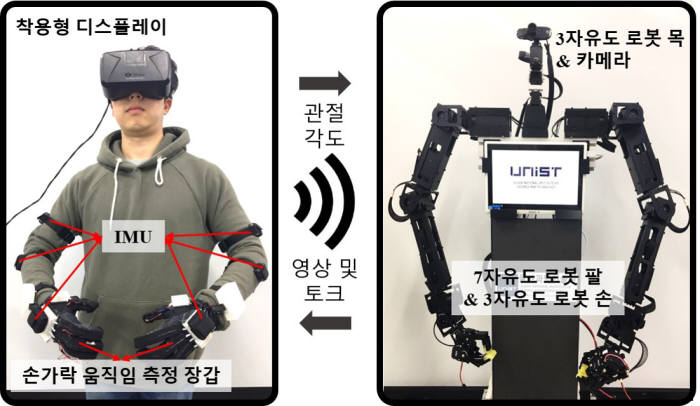
배 교수가 선보인 원격 재난 대응 로봇은 사용자 착용부와 로봇부로 구성됐다. 사람이 착용부를 몸에 걸치고 직접 작업하듯 로봇을 원격 조종하는 방식이다.
착용부에는 팔의 움직임을 측정하는 센서를 부착한 수트와 손가락 움직임을 감지하는 특수 장갑을 탑재, 착용자의 움직임에 맞춰 로봇이 똑같이 작동하도록 했다.
사용자 착용부와 로봇부는 롱텀에벌루션(LTE) 방식으로 통신, 원거리에서도 운용할 수 있다.
로봇부는 7개 관절과 3개 손가락으로 제작, 복잡한 작업도 사람처럼 정밀하게 수행할 수 있다.
착용부의 특수 장갑을 끼고 있으면 로봇에 가해진 힘이 진동으로 전달된다. 또 로봇 머리에 부착한 카메라는 사용자의 머리 움직임에 따라 움직인다. 로봇이 촬영하는 영상은 착용형 디스플레이로 확인할 수 있다.
배 교수는 “마치 사람이 현장에서 작업하는 것처럼 로봇을 정확하고 세밀하게 조종할 수 있는 원격조종 시스템으로 만들고 있다”면서 “빠른 시일 내에 현장에 투입할 수 있는 모델을 선보이겠다”고 말했다.
배 교수는 이 재난 대응 로봇 기술로 이날 `2016 대한민국 안전기술대상`에서 국민안전처장관 표창을 수상했다.
울산=임동식기자 dslim@etnews.com

