






지형에 따라 스스로 다리 길이를 변형할 수 있는 로봇이 개발됐다. 향후 해저나 우주 탐사 등에 적극 활용될 확률이 높다. 형태를 스스로 바꿀 수 있는 로봇이 세계 곳곳에서 개발되고 있다.
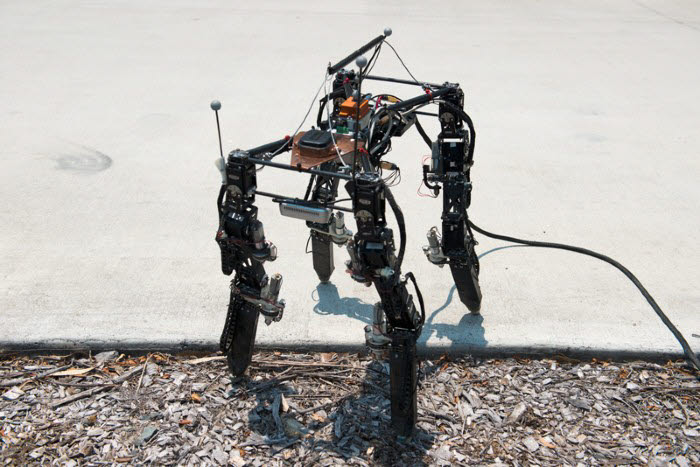
최근 노르웨이 오슬로대 연구진은 지형 환경에 따라 스스로 다리를 늘리고 줄일 수 있는 로봇 '다이렛(DyRET)'을 개발했다.
네 발로 걸어 다니는 이 로봇의 길이는 60㎝다. 이 로봇은 상황에 따라 길이를 약 20% 긴 73㎝까지 늘릴 수 있는 독특한 기능을 가지고 있다.
연구진은 “평평하고 장애물이 없는 길에서는 긴 다리로 빠르게 이동할 수 있도록 다리 길이가 늘어나고, 험난한 지형에서는 자세를 낮춰서 천천히 이동할 수 있는 성능을 탑재했다”고 설명했다.
오슬로대 연구진은 로봇이 이러한 기능을 스스로 해낼 수 있도록 곳곳에 센서를 달았다. 각 발에 달린 센서 장치로 내딛고 있는 땅이 얼마나 단단한지 파악할 수 있고, 다이렛 로봇 앞다리에 장착된 3차원(3D) 카메라로 땅의 거칠기를 알아낼 수 있다.
이 기능을 구현하기 위해 연구진은 다양한 실험을 거쳤다. 모래, 시멘트, 자갈 등 다양한 표면으로 구성된 5m 길이 박스를 준비한 뒤, 25개 각각 다른 소재로 만들어진 다리로 실험을 거쳐 최상의 조합을 찾아냈다.
또 로봇 안에는 머신러닝 기능도 탑재돼 있다. 로봇이 다양한 지형을 경험할수록 데이터가 쌓여, 예상치 못한 상황에서도 최적의 자세를 취하며 걸을 수 있다.
로봇의 기능이 고도화된다면 육지뿐 아니라 다양한 공간에서 쓰일 수 있을 것으로 보인다. 먼 미래에 해저나 우주 탐사에도 이 로봇이 활용될 것으로 예측된다.
한편 공상과학 영화처럼 스스로 몸을 변형하는 로봇을 개발하는 움직임이 세계 곳곳에서 포착되고 있다.
최근 미국 조지아대 연구진은 바퀴에 갈퀴를 달아서 이동할 수 있는 로봇을 개발했다.
로봇이 울퉁불퉁한 비포장도로나 오르막길을 마주했을 때 스스로 팔을 뻗어 갈퀴를 달고 장애물이 있는 구간을 이동하는 기술이다. 이들은 모래나 눈, 물에서 모양을 변형해 이동할 수 있는 로봇을 만드는 것이 목표라고 밝혔다.
강해령기자 kang@etnews.com