






미국 하버드대 연구진이 복잡한 작업을 집단적으로 수행할 수 있는 로봇 개미를 개발했다.
로봇 개미는 협력 작업을 수행하는 과정에서 '물리적인 지능(physical intelligence)'을 활용한다. 마하데반 하버드대 교수는 “이번 프로젝트는 흰개미나 벌 같은 사회적 곤충 집단적인 역학을 이해하기 위해 진행됐다”면서 “곤충이 어떻게 환경을 조작하며 복잡하고 기능적인 구조물을 만드는 지를 연구하고 있다”고 말했다.
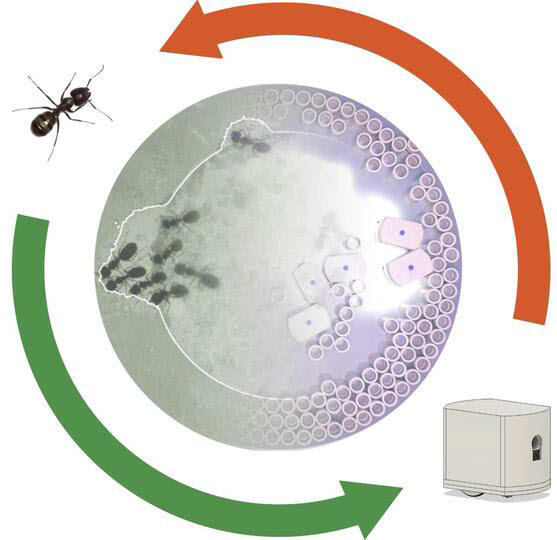
연구팀은 부드러운 울타리 안에 갇혀 있는 왕개미가 협력 작업을 어떻게 수행하면서 울타리에서 빠져 나오는지를 연구했다. 개미는 주변 환경 또는 다른 개미와 상호작용하기 위해 주로 더듬이에 의존한다.
연구팀은 개미가 자주 상호작용하는 지역 주변에 자발적으로 모인다는 것을 발견했다.
연구팀은 개미의 군집 활동을 관찰하는 과정에서 '집단 협력의 강도'와 '굴착 속도'라는 두 개의 매개 변수가 중요하다'는 점을 확인했다.
매개변수를 암호화하는 수학적 모델 수치 시뮬레이션으로 개미들은 효율적으로 굴착함과 동시에 서로 충분히 협력해야만 성공적인 굴착이 가능하다는 점을 이해했다. 이런 결과를 토대로 연구팀은 비슷한 울타리를 탈출하기 위해 협력 작업을 수행하는 로봇 개미인 R앤츠(Rants)를 만들었다.
연구팀은 “우리는 어떻게 협력적인 작업이 단순한 규칙에서 발생할 수 있는지 증명했다”면서 “유사한 행동규칙이 건설, 수색, 구조, 방어와 같은 다른 복잡한 문제를 해결하는 데 적용될 수 있을 것”이라고 설명했다.
이 기술은 다양한 유형 통신 분야에서 활용될 수 있다. 수십대 또는 수백대 로봇으로 구성된 로봇 팀에도 확대 적용될 수 있다. 협업 로봇의 생산성 확대 등으로 응용 가능하다.
이 방식은 협업 문제를 해결하는 복원력이 뛰어나다는 점이 핵심이다. 일부 개별 로봇이 임무에 실패하더라도 나머지 팀원들이 임무를 완수할 수 있다. 기존 군집 로봇의 한계를 극복할 수 있는 새로운 기술로 평가받고 있다. 연구팀은 이번 연구 성과를 세계적 학술지인 'E라이프'에 발표했다.
박소라기자 srpark@etnews.com