






현대차그룹이 미래차 내비게이션 기반 기술을 확보했다. 커넥티드카가 수집한 차량 데이터를 클라우드 서버에서 인공지능(AI)이 분석하고, 그 결과를 다른 차량에 재공유하는 방식이다. 노면 상태를 비롯한 도로 상황을 다른 차량과 상호 공유해 주행 안전성을 높일 뿐 아니라 향후 자율주행 기술력 제고에도 기여할 전망이다.
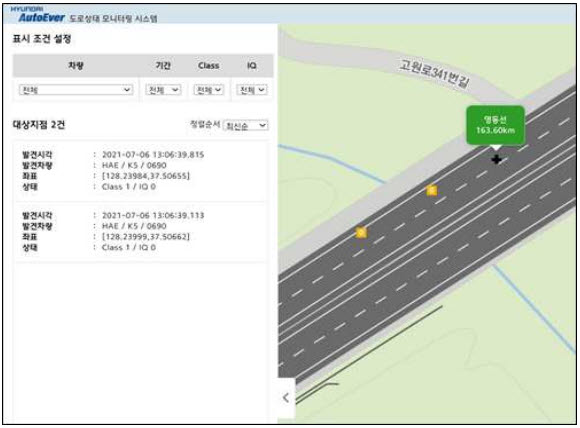
1일 한국도로공사에 따르면 현대오토에버는 국민대와 2019년 4월부터 올해 7월까지 진행한 '차량 내부(CAN) 데이터 기반 도로상황 판단 시스템 개발' 연구를 통해 관련 기술을 확보했다. 한국도로공사 연구용역으로 비공용도로와 공용도로에서 실증까지 마쳤다.
현대차, 기아, 제네시스는 관련 기술을 양산차에 적용하기 위해 각각 '블루링크' '기아 커넥트' '제네시스 커넥트' 등 커넥티드카 위치기반서비스 이용약관도 개정했다.
현대오토에버가 개발한 도로상황 판단 시스템은 △차량용 단말기를 포함한 데이터 수집 시스템 △도로상황 판단 모델링 시스템 △도로상황 제공 시스템 등으로 이뤄진다. 완성차 제조사가 원격 접속을 막아둔 CAN 데이터를 수집해 활용한다는 게 특징이다.

차량용 단말기는 CAN 데이터, 카메라 영상 데이터, GPS 데이터를 추출·저장하고 이동통신망으로 클라우드 서버에 전송한다. 클라우드 서버에선 AI 기반 도로상황 판단 소프트웨어(SW)가 수신한 데이터를 분석한 뒤 도로상황을 인근 차량에 제공한다.
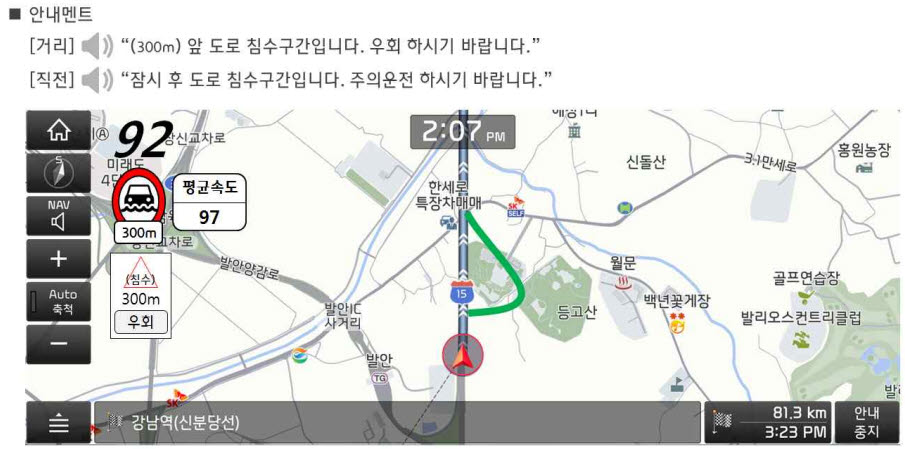
주변 차량은 공유받은 정보 기반의 경고문을 내비게이션을 통해 표시한다. 운전자는 이를 참고해 적절히 대응할 수 있다. 위험 상황에서도 운전자 개입이 필요하지 않은 레벨4 자율주행에선 차량이 스스로 대응할 것으로 예상된다.
현대차그룹은 우선 도로 파손과 미끄럼 상황을 감지해 다른 차량에 공유하는 기술을 도입할 계획이다. 노면 상태는 차량의 네 바퀴 속도를 기반으로 연산한 미끄럼비(Slip ratio) 값과 종방향 및 종·횡 방향 가속도 값을 통해 파악한다. 정확한 차로 파악을 위해 정밀지도도 활용한다. 도로상황 판단 시스템 성능은 공용도로 실증에선 85% 이상을 기록했다.
포트홀을 비롯한 도로 파손 여부 검출은 카메라 영상 데이터를 AI로 분석해 이뤄진다. 다만 실증에선 포트홀 규격 정의가 불분명하고 학습 데이터 부족으로 딥러닝 한계가 있어 인식률이 20%대로 높지 않았다. 기술을 개발한 현대오토에버는 가속도 센서 신호 등 차량 내부 데이터와 융합하는 방식으로 성능 개선이 필요하다고 진단했다.
향후에는 △낙하물, 도로 작업 구간 등 도로 위험 구간 △파손·포트홀 등 물리적 노면 상태 △결빙·수막·안개·침수 등 기상에 따른 도로 상황 △기상정보 △도로 정체 정보 등에 대한 정보도 인근 차량에 제공해 사고 발생 위험을 줄일 계획이다.
현대차그룹은 CAN 통신 보안을 위해 직접적으로 외부와 연결하지 않고 차량 진단을 위한 OBD 단자를 통해 CAN 데이터 일부를 수집하는 방식으로 서비스를 상용화할 것으로 예상된다.
현대오토에버는 용역 최종 보고서를 통해 “도로상황 정보를 실시간 수집해 다양한 채널로 서비스한다면 교통사고를 획기적으로 줄이는데 기여할 수 있다”며 “자율주행 자동차의 상용화를 앞당기는데도 기여할 것”이라고 평가했다.
박진형기자 jin@etnews.com

